
বাড়ি / খবর / শিল্প সংবাদ / AGV সিস্টেমে কোন মোটর ব্যবহার করা হয় এবং আপনি কীভাবে সঠিক AGV ড্রাইভ মোটর চয়ন করবেন?

 ভাষা
ভাষা
অ্যাপ্লিকেশন শিল্প
এজিভি
স্বয়ংক্রিয় রোবট

লেজার কাটিং

লজিস্টিক বাছাই

ফটোভোলটাইক পাওয়ার-স্টেশন

চিকিত্সা ডিভাইস
AGV সিস্টেমে কোন মোটর ব্যবহার করা হয় এবং আপনি কীভাবে সঠিক AGV ড্রাইভ মোটর চয়ন করবেন?
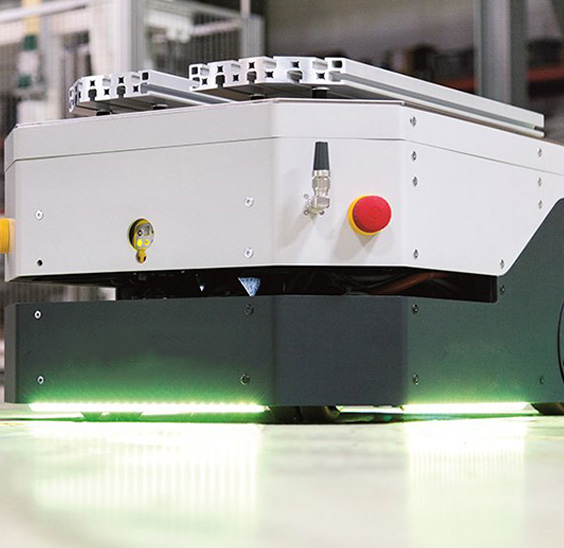
ড্রাইভ মোটর একটি অটোনোমাস গাইডেড ভেহিকেল (AGV) এর সবচেয়ে গুরুত্বপূর্ণ ইলেক্ট্রোমেকানিক্যাল উপাদান। এটি নির্ধারণ করে যে AGV কীভাবে ত্বরান্বিত হয়, এটি নিজেকে কতটা সঠিকভাবে অবস্থান করে, এটি কতটা পেলোড সরাতে পারে, চার্জের মধ্যে এর ব্যাটারি কতক্ষণ স্থায়ী হয় এবং ড্রাইভ সিস্টেমের রক্ষণাবেক্ষণের প্রয়োজন হওয়ার আগে গাড়িটি কতক্ষণ কাজ করে। একটি কম শক্তিযুক্ত বা ভুলভাবে নির্দিষ্ট ড্রাইভ মোটর সহ একটি AGV উত্পাদনে তার পেলোড এবং গতির প্রয়োজনীয়তা পূরণ করতে পারে না; দুর্বল মোটর দক্ষতা সহ একটি লজিস্টিক অপারেশন মিটমাট করতে পারে তার চেয়ে দ্রুত ব্যাটারি নিষ্কাশন করে; একটি ড্রাইভ মোটর সহ যার জন্য ঘন ঘন রক্ষণাবেক্ষণের প্রয়োজন হয় এমন একটি সিস্টেমে অপরিকল্পিত ডাউনটাইম তৈরি করে যার সম্পূর্ণ মূল্য প্রস্তাব নির্ভরযোগ্য, ক্রমাগত স্বায়ত্তশাসিত অপারেশন।
AGV সিস্টেম ইন্টিগ্রেটরদের জন্য, ড্রাইভের উপাদানগুলি নির্দিষ্ট করা রোবোটিক্স ইঞ্জিনিয়ার, AGV প্ল্যাটফর্মের মূল্যায়নকারী ওয়্যারহাউস অটোমেশন দল, এবং নতুন AGV যানবাহন ডিজাইন করা OEM সরঞ্জাম বিকাশকারী, AGV ড্রাইভ সিস্টেমে ব্যবহৃত মোটর প্রযুক্তিগুলি বোঝা — এবং স্পেসিফিকেশন প্যারামিটার যা নির্ধারণ করে যে কোন প্রযুক্তি কোন অ্যাপ্লিকেশনের সাথে মানানসই — সঠিক সিদ্ধান্ত নেওয়ার জন্য প্রয়োজনীয় জ্ঞান। এই নির্দেশিকা AGV ড্রাইভ মোটর প্রকার, নির্বাচন পরামিতি, এবং নির্দিষ্ট প্রয়োজনীয়তাগুলি কভার করে যা সাধারণ শিল্প মোটর অ্যাপ্লিকেশন থেকে AGV মোটর অ্যাপ্লিকেশনগুলিকে আলাদা করে।
কেন AGV ড্রাইভ মোটর প্রয়োজনীয়তা সাধারণ শিল্প মোটর প্রয়োজনীয়তা থেকে ভিন্ন
AGV ড্রাইভ মোটরগুলি একটি চাহিদাপূর্ণ এবং স্বাতন্ত্র্যসূচক সেটে কাজ করে যা তাদের বেশিরভাগ সাধারণ শিল্প মোটর অ্যাপ্লিকেশন থেকে আলাদা করে:
ব্যাটারি পাওয়ার সাপ্লাই। সমস্ত AGV ব্যাটারি চালিত — এগুলি AC মেইন পাওয়ারের সাথে সংযোগ ছাড়াই একটি DC ব্যাটারি প্যাক (সাধারণত 24V, 36V, বা 48V নামমাত্র) থেকে কাজ করে৷ এটির জন্য মৌলিকভাবে ডিসি-সামঞ্জস্যপূর্ণ ড্রাইভ মোটর প্রয়োজন। এসি মোটরগুলি অনবোর্ড ইনভার্টারগুলির সাথে ব্যবহার করা যেতে পারে, তবে ব্যাটারি চালিত সিস্টেমে ডিসি-টু-এসি ইনভার্সনের দক্ষতার শাস্তি উল্লেখযোগ্য। DC মোটর - এবং বিশেষ করে BLDC মোটর - হল প্রভাবশালী পছন্দ কারণ তারা ব্যাটারি পাওয়ার সরাসরি গ্রহণ করে (অথবা একটি DC-DC রূপান্তরকারীর মাধ্যমে) ইনভার্সন পেনাল্টি ছাড়াই।
ঘন ঘন স্টার্ট-স্টপ চক্র। AGVগুলি বিশ্রাম থেকে ভ্রমণের গতিতে ত্বরান্বিত হয়, একটি পিক বা ডিপোজিট পয়েন্টে নেভিগেট করে এবং থামে — বারবার, প্রতিদিন শত শত বা হাজার বার। ড্রাইভ মোটরকে অবশ্যই এই স্টার্ট-স্টপ সাইকেলটি অত্যধিক গরম বা অতিরিক্ত পরিধান ছাড়াই পরিচালনা করতে হবে, যা মোটরের তাপ ব্যবস্থাপনার উপর চাহিদা রাখে এবং ব্রাশ করা মোটরগুলির জন্য, কমিউটেটর এবং ব্রাশ অ্যাসেম্বলি যা উচ্চ-কারেন্ট স্টার্টিং ট্রানজিয়েন্টগুলি পরিচালনা করে।
দ্বিমুখী অপারেশন। AGV গুলিকে অবশ্যই সামনের দিকে এবং বিপরীত উভয়দিকেই চালাতে হবে — এবং যান্ত্রিক শক ছাড়াই পরিষ্কারভাবে দিকগুলির মধ্যে স্থানান্তর করতে হবে৷ মোটর এবং এর নিয়ামককে অবশ্যই মসৃণ দ্বিমুখী গতি নিয়ন্ত্রণ সমর্থন করতে হবে। স্টিয়ারিং-ডিফারেনশিয়াল AGV-এর জন্য (যেখানে বাম এবং ডানে স্বাধীন চাকার গতি নিয়ন্ত্রণ বাঁক তৈরি করে), সঠিক স্টিয়ারিংয়ের জন্য দুটি ড্রাইভ মোটরকে অবশ্যই তাদের গতি-টর্ক প্রতিক্রিয়ার সাথে অবিকলভাবে মিলে যেতে হবে।
সুনির্দিষ্ট গতি এবং অবস্থান নিয়ন্ত্রণ। আধুনিক AGV-এ নেভিগেশন নির্ভুলতা - বিশেষ করে লেজার-গাইডেড (LiDAR), দৃষ্টি-নির্দেশিত, বা চৌম্বক-ট্র্যাক AGV - এর জন্য সুনির্দিষ্ট গতি নিয়ন্ত্রণ প্রয়োজন এবং কিছু সিস্টেমে, ড্রাইভ মোটর এনকোডার থেকে সুনির্দিষ্ট অবস্থানের প্রতিক্রিয়া প্রয়োজন। মোটরটিকে অবশ্যই তার পেলোড এবং ভূখণ্ডের পরিসীমা জুড়ে অবিচ্ছিন্ন, নিয়ন্ত্রিত গতিতে কাজ করতে হবে গতি শিকার বা অস্থিরতা ছাড়াই।
ব্যাটারি জীবনের জন্য উচ্চ দক্ষতা. একটি ব্যাটারি চালিত স্বায়ত্তশাসিত গাড়িতে, মোটর দক্ষতা সরাসরি চার্জের মধ্যে অপারেটিং সময় নির্ধারণ করে। একটি ড্রাইভ মোটর সিস্টেম যা 75% এর পরিবর্তে 85% দক্ষতায় চালিত হয় গাড়ির অপারেটিং পরিসরকে প্রায় 13% প্রসারিত করে, যা একটি লজিস্টিক অ্যাপ্লিকেশনে একটি ব্যাটারি চক্রের মধ্যে একটি গাড়ির রুট সম্পূর্ণ করার এবং একটি অনির্ধারিত চার্জ স্টপ প্রয়োজনের মধ্যে পার্থক্য হতে পারে। AGV মোটর নির্বাচনের ক্ষেত্রে শক্তি দক্ষতা একটি প্রথম-শ্রেণীর স্পেসিফিকেশন প্রয়োজনীয়তা, গৌণ বিবেচনা নয়।
AGV ড্রাইভ সিস্টেমে ব্যবহৃত প্রধান মোটর প্রকার
ব্রাশলেস ডিসি গিয়ার মোটরস (বিএলডিসি): প্রভাবশালী AGV ড্রাইভ প্রযুক্তি
ব্রাশলেস ডিসি গিয়ার মোটর হল আধুনিক AGV সিস্টেমের জন্য অত্যধিক পছন্দের ড্রাইভ মোটর প্রযুক্তি। BLDC মোটর একটি ঐতিহ্যবাহী ব্রাশ করা ডিসি মোটরের যান্ত্রিক কমিউটেটর এবং ব্রাশ অ্যাসেম্বলিকে ইলেকট্রনিক কম্যুটেশন দিয়ে প্রতিস্থাপন করে — একটি মোটর কন্ট্রোলার রটার পজিশন পড়ে (হল ইফেক্ট সেন্সর বা এনকোডার ফিডব্যাকের মাধ্যমে) এবং কোনও শারীরিক ব্রাশের যোগাযোগ ছাড়াই ঘূর্ণন বজায় রাখার জন্য সঠিক ক্রমানুসারে স্টেটর উইন্ডিংগুলি স্যুইচ করে। এই ইলেকট্রনিক কমিউটেশনই BLDC মোটরকে AGV প্রসঙ্গে ব্রাশ করা মোটরগুলির উপর তাদের নির্দিষ্ট সুবিধা দেয়:
কোন ব্রাশ পরিধান = কোন ব্রাশ রক্ষণাবেক্ষণ. একটি ব্রাশ করা DC মোটরে, কমিউটার রিংগুলির বিরুদ্ধে চাপ দেওয়া কার্বন ব্রাশগুলি অপারেশন চলাকালীন অবিচ্ছিন্নভাবে পরিধান করে। হাই ডিউটি সাইকেলে — তিন-শিফ্ট লজিস্টিক অপারেশনে প্রতিদিন 20 ঘণ্টা AGV কাজ করে — ব্রাশ প্রতিস্থাপনের ব্যবধান কয়েক মাসের মধ্যে পৌঁছানো যেতে পারে, যার জন্য নির্ধারিত ডাউনটাইম এবং প্রতিস্থাপন শ্রমের প্রয়োজন হয়। BLDC মোটর পরতে কোন ব্রাশ নেই; শুধুমাত্র পরিধানের উপাদান হল মোটর বিয়ারিং, যার পরিসেবা জীবন হাজার হাজার ঘন্টার মধ্যে পরিমাপ করা হয়। একটি AGV ফ্লিট ক্রমাগত পরিচালনার জন্য, ব্রাশ রক্ষণাবেক্ষণ দূর করা একটি উচ্চ পরিচালন ব্যয় এবং আপটাইম সুবিধা।
উচ্চতর দক্ষতা। বিএলডিসি মোটরগুলি সাধারণত 90-95% বৈদ্যুতিক-থেকে-যান্ত্রিক দক্ষতা অর্জন করে তাদের রেট করা অপারেটিং পয়েন্টে, সমতুল্য ব্রাশড ডিসি মোটরগুলির জন্য 75-85% এর তুলনায়। একটি ব্যাটারি-চালিত AGV-এ, এই দক্ষতার পার্থক্য সরাসরি প্রতি চার্জ চক্রে আরও বেশি কাজের সময়ে অনুবাদ করে।
ভাল তাপ কর্মক্ষমতা. বিএলডিসি মোটর তাপ প্রাথমিকভাবে স্টেটর উইন্ডিংগুলিতে উত্পন্ন হয়, যা মোটর হাউজিংয়ের সাথে সরাসরি যোগাযোগ করে, তাপ অপচয়কে দক্ষ করে তোলে। ব্রাশ করা মোটরগুলি উইন্ডিং এবং কমিউটার/ব্রাশের যোগাযোগ বিন্দুতে তাপ উৎপন্ন করে এবং ব্রাশের যোগাযোগ বিন্দুটি মোটরের অভ্যন্তরে থাকে, যেখানে তাপ অপচয় কম কার্যকর হয়। BLDC মোটর অতিরিক্ত গরম না করেই উচ্চতর ক্রমাগত ডিউটি চক্র বজায় রাখে।
সুনির্দিষ্ট গতি নিয়ন্ত্রণ। এনকোডার বা হল সেন্সর ফিডব্যাক সহ ইলেকট্রনিক কম্যুটেশন একটি বিস্তৃত অপারেটিং পরিসর জুড়ে টাইট ক্লোজড-লুপ গতি নিয়ন্ত্রণ সক্ষম করে। AGV নেভিগেশন অ্যালগরিদমগুলি পরম অবস্থানের ফিক্সগুলির মধ্যে ডেড-রেকনিং অবস্থান অনুমানের জন্য সঠিক চাকা গতির প্রতিক্রিয়ার উপর নির্ভর করে — এনকোডার প্রতিক্রিয়া সহ BLDC মোটরগুলি এই নির্ভুলতাকে নির্ভরযোগ্যভাবে সরবরাহ করে।
ব্রাশড ডিসি গিয়ার মোটর: লোয়ার-ডিউটি AGV অ্যাপ্লিকেশনের জন্য খরচ-কার্যকর
ব্রাশড ডিসি গিয়ার মোটরগুলি AGV অ্যাপ্লিকেশনগুলিতে ব্যবহার করা হয় যেখানে অপারেটিং ডিউটি চক্র কম (একটানা 24/7 অপারেশন নয়), যেখানে পেলোডের প্রয়োজনীয়তা শালীন, এবং যেখানে কম মোটর খরচ খরচ-সংবেদনশীল AGV প্ল্যাটফর্মগুলিতে অগ্রাধিকার। হালকা-শুল্ক অভ্যন্তরীণ সরবরাহের জন্য ডিজাইন করা AGV-তে - ছোট অংশ পরিবহন, নথি সরবরাহ, হালকা উত্পাদন লাইন সমর্থন - ব্রাশ করা DC মোটরগুলির জন্য প্রয়োজনীয় সহজতর নিয়ন্ত্রণ ইলেকট্রনিক্স (কোনও কম্যুটেশন কন্ট্রোলারের প্রয়োজন নেই) এবং তাদের নিম্ন ইউনিট খরচ ব্রাশ রক্ষণাবেক্ষণের প্রয়োজনীয়তা সত্ত্বেও BLDC বিকল্পগুলির উপর তাদের নির্বাচনকে ন্যায্যতা দিতে পারে।
ব্রাশ করা ডিসি মোটরগুলিও খুব উচ্চ স্টার্টিং টর্ক প্রদান করে — কিছু ডিজাইনে সমতুল্য আকারের BLDC মোটরের চেয়েও বেশি — যা ইনলাইনে লোডের নিচে শুরু হওয়া AGV-এর জন্য উপযোগী হতে পারে। যাইহোক, আধুনিক BLDC মোটর কন্ট্রোলাররা ক্ষেত্র-ভিত্তিক নিয়ন্ত্রণ কৌশলগুলির মাধ্যমে এই উচ্চ স্টার্টিং টর্ক আচরণের প্রতিলিপি তৈরি করতে পারে, এই এলাকায় ব্রাশ করা মোটরের ঐতিহাসিক সুবিধা হ্রাস করে।
AGV ড্রাইভ চাকার জন্য প্ল্যানেটারি গিয়ার মোটর
মোটর উপাদান ব্রাশ করা বা ব্রাশবিহীন ডিসি যাই হোক না কেন, AGV ড্রাইভ চাকা প্রায় সর্বজনীনভাবে মোটর এবং চাকার মধ্যে গ্রহগত গিয়ার হ্রাস ব্যবহার করে। বিভিন্ন কারণে AGV অ্যাপ্লিকেশনের জন্য গ্রহগত গিয়ার কনফিগারেশন পছন্দের গিয়ারবক্স প্রকার:
প্ল্যানেটারি গিয়ারগুলি সর্বোচ্চ টর্কের ঘনত্ব প্রদান করে — একটি প্রদত্ত গিয়ারবক্সের বাইরের ব্যাসের জন্য সর্বোচ্চ আউটপুট টর্ক — যা AGV হুইল অ্যাসেম্বলিতে গুরুত্বপূর্ণ যেখানে সম্পূর্ণ মোটর-গিয়ারবক্স-হুইল ইউনিটটি গাড়ির চ্যাসিসের কঠোর মাত্রার সীমাবদ্ধতার মধ্যে ফিট করা আবশ্যক। একটি প্ল্যানেটারি গিয়ারবক্সের সমাক্ষীয় ইনপুট/আউটপুট সারিবদ্ধকরণ একটি কমপ্যাক্ট ইনলাইন সমাবেশের অনুমতি দেয়: মোটর → প্ল্যানেটারি গিয়ারবক্স → ড্রাইভ হুইল, সমস্ত একটি একক অক্ষে, স্পার গিয়ার বা ওয়ার্ম গিয়ার হ্রাস দ্বারা তৈরি অফসেট ছাড়াই।
প্ল্যানেটারি গিয়ারবক্সগুলিও ওয়ার্ম গিয়ার বিকল্পগুলির তুলনায় উচ্চ দক্ষতা (প্রতি ধাপে 92-97%) প্রদান করে (সাধারণত 50-85% অনুপাত এবং সীসা কোণের উপর নির্ভর করে), যা ব্যাটারি-দক্ষতা-সমালোচনামূলক AGV প্রয়োগের ক্ষেত্রে গুরুত্বপূর্ণ। 70% গিয়ারবক্স দক্ষতায় চলমান একটি ওয়ার্ম গিয়ার AGV ড্রাইভ মোটর শুধুমাত্র গিয়ারবক্সে গরম করার জন্য মোটরের বৈদ্যুতিক শক্তি ইনপুট 30% হারায় — একটি ব্যাটারি চালিত গাড়ির জন্য একটি অগ্রহণযোগ্য শাস্তি৷
AGV ড্রাইভ মোটর নির্বাচনের জন্য মূল স্পেসিফিকেশন প্যারামিটার
| প্যারামিটার | সাধারণ AGV স্পেসিফিকেশন রেঞ্জ | কেন এটা ব্যাপার |
|---|---|---|
| রেটেড ভোল্টেজ | 24V / 36V / 48V DC | AGV ব্যাটারি প্যাক ভোল্টেজের সাথে মেলে; উচ্চ ভোল্টেজ নিম্ন কারেন্টে উচ্চ শক্তির অনুমতি দেয়, তারের ক্ষতি এবং মোটর তাপমাত্রা হ্রাস করে |
| রেট পাওয়ার | 50W - 1,000W প্রতি ড্রাইভ মোটর (যানবাহন এবং পেলোডের উপর নির্ভর করে) | অপারেটিং পরিবেশে খাড়া গ্রেডে লোড করা গাড়িটিকে ত্বরান্বিত করার জন্য যথেষ্ট হতে হবে; আন্ডারপাওয়ারিং ইনলাইনে মোটর থার্মাল ওভারলোড ঘটায় |
| চাকা এ আউটপুট গতি | 50-300 RPM (চাকার খাদ, গিয়ার হ্রাসের পরে) | গাড়ির ভ্রমণের গতি নির্ধারণ করে; চাকার ব্যাস এবং লক্ষ্য AGV গতি প্রয়োজনীয় আউটপুট শ্যাফ্ট RPM এবং সেইজন্য প্রয়োজনীয় গিয়ার অনুপাত সংজ্ঞায়িত করে |
| ক্রমাগত আউটপুট টর্ক | 5-200 Nm প্রতি ড্রাইভ মোটর (পেলোড এবং ইনলাইনের উপর নির্ভর করে) | রেট করা গতিতে সর্বোচ্চ গ্রেডে সম্পূর্ণরূপে লোড করা AGV সরানোর জন্য প্রয়োজনীয় টর্ক অতিক্রম করতে হবে; শক লোড মার্জিনের জন্য 2× নিরাপত্তা ফ্যাক্টর প্রয়োগ করুন |
| পিক টর্ক | 2×–3× একটানা টর্ক | সম্পূর্ণ লোডের অধীনে স্থবির থেকে ত্বরণের জন্য প্রয়োজনীয়; মোটর এবং কন্ট্রোলারকে ত্বরণ র্যাম্পের সময়কালের জন্য অত্যধিক গরম না করে বা ওভারকারেন্ট সুরক্ষা ট্রিগার না করে সর্বোচ্চ টর্ক বজায় রাখতে হবে |
| এনকোডার রেজোলিউশন | 100-4096 PPR (মোটর শ্যাফটে প্রতি বিপ্লবে ডাল) | ডেড-রেকনিং নেভিগেশনের জন্য ওডোমেট্রি নির্ভুলতা নির্ধারণ করে; উচ্চতর এনকোডার রেজোলিউশন নেভিগেশন সেন্সর থেকে পরম অবস্থান সংশোধনের মধ্যে অবস্থান অনুমান উন্নত করে |
| কর্মদক্ষতা | ≥ 85% সামগ্রিক (মোটর গিয়ারবক্স) রেট করা অপারেটিং পয়েন্টে | সরাসরি ব্যাটারি অপারেটিং সময় নির্ধারণ করে; BLDC গ্রহ 90% সম্মিলিত দক্ষতা অর্জন করে; ব্রাশড ওয়ার্ম গিয়ারের চেয়ে এটি পছন্দ করুন (60-70% মিলিত) |
| আইপি রেটিং | সাধারণ গৃহমধ্যস্থ সরবরাহের জন্য সর্বনিম্ন IP54; ভিজা বা ধুলোময় পরিবেশের জন্য IP65 | AGV মোটরগুলি মেঝে-স্তরের দূষকগুলির সংস্পর্শে আসে; অপর্যাপ্ত প্রবেশ সুরক্ষা ধুলো এবং আর্দ্রতা থেকে অকাল ভারবহন এবং ঘুরতে ব্যর্থতার দিকে পরিচালিত করে |
| ডিউটি চক্র | 24/7 অপারেশনের জন্য S1 একটানা; S3 একক-শিফটের জন্য বিরতিহীন | মোটর তাপীয় রেটিং অবশ্যই অপারেশনাল প্যাটার্নের সাথে মেলে; S3 বিরতিহীন শুল্কের জন্য রেট করা একটি মোটর ক্রমাগত S1 AGV অ্যাপ্লিকেশনগুলিতে অতিরিক্ত গরম হবে |
কীভাবে প্রয়োজনীয় AGV ড্রাইভ মোটর টর্ক গণনা করবেন
একটি সমতল পৃষ্ঠে ধ্রুবক গতিতে একটি AGV চালানোর জন্য প্রয়োজনীয় টর্ককে অবশ্যই ঘূর্ণায়মান প্রতিরোধকে অতিক্রম করতে হবে; একটি বাঁকের উপর, মাধ্যাকর্ষণ একটি গ্রেড প্রতিরোধের উপাদান যোগ করে। একটি সাধারণ টু-ড্রাইভ-হুইল AGV-এর জন্য গণনা:
মোট গাড়ির ওজন: W = (AGV tare ওয়েট সর্বোচ্চ পেলোড) × g [নিউটন]
রোলিং প্রতিরোধ শক্তি: F_rolling = W × μ_r, যেখানে μ_r হল ঘূর্ণায়মান প্রতিরোধের সহগ (সাধারণত 0.01–0.02 মসৃণ কংক্রিটে রাবারের চাকার জন্য; 0.02–0.05 নরম মেঝে বা রুক্ষ পৃষ্ঠের জন্য)
গ্রেড প্রতিরোধ শক্তি (ইনলাইনের জন্য): F_grade = W × sin(θ), যেখানে θ হল গ্রেড কোণ (5% গ্রেডের জন্য, θ ≈ 2.86°, sin(θ) ≈ 0.05)
মোট ড্রাইভ ফোর্স: F_total = F_rolling F_grade
ড্রাইভ হুইলে প্রয়োজনীয় টর্ক (প্রতি মোটর, দুটি ড্রাইভ মোটর ধরে নিলে): T_wheel = (F_total / 2) × r_wheel, যেখানে r_wheel হল ড্রাইভ চাকার ব্যাসার্ধ মিটারে
প্রয়োজনীয় মোটর টর্ক: T_motor = T_wheel / (i × η), যেখানে i হল গিয়ার কমানোর অনুপাত, এবং η হল গিয়ারবক্সের দক্ষতা
উদাহরণস্বরূপ, 500 কেজি মোট লোড করা ওজন, 150 মিমি ব্যাসের ড্রাইভ চাকা সহ একটি AGV, 3% গ্রেডে, 0.95 দক্ষতায় 25:1 গ্রহের গিয়ারবক্স সহ:
- W = 500 × 9.81 = 4,905 N
- F_rolling = 4,905 × 0.015 = 73.6 N
- F_grade = 4,905 × 0.03 = 147.2 N
- F_total = 220.8 N; প্রতি মোটর = 110.4 N
- T_wheel = 110.4 × 0.075 = 8.28 Nm
- T_motor = 8.28 / (25 × 0.95) = 0.35 Nm রেটেড একটানা টর্ক
ত্বরণ ঘূর্ণন সঁচারক বল জন্য 2× নিরাপত্তা ফ্যাক্টর যোগ করুন: সর্বোচ্চ মোটর টর্ক প্রয়োজনীয়তা ≈ 0.70 Nm। 25:1 অনুপাতের সাথে 48V এ ≥ 0.70 Nm পিক টর্ক সহ একটি BLDC প্ল্যানেটারি গিয়ার মোটর এই প্রয়োজনীয়তা পূরণ করে। ক্রমাগত টর্ক রেটিং পর্যাপ্ত তাপীয় মার্জিন সহ ক্রমাগত প্রয়োজনীয় টর্ক (গ্রেডে সম্পূর্ণ পেলোডে 0.35 Nm) এর বিপরীতে যাচাই করা উচিত।
প্রায়শই জিজ্ঞাসিত প্রশ্নাবলী
কিভাবে একটি AGV এর স্টিয়ারিং কনফিগারেশন মোটর নির্বাচনকে প্রভাবিত করে?
AGV গুলি বিভিন্ন স্টিয়ারিং কনফিগারেশন ব্যবহার করে, যার প্রতিটিতে বিভিন্ন মোটর প্রয়োজনীয়তা রয়েছে। ডিফারেনশিয়াল ড্রাইভ (দুটি স্বাধীন ড্রাইভ হুইল, স্টিয়ারিং হুইল নেই) দুটি ড্রাইভ মোটরকে ভিন্ন গতিতে চালানোর মাধ্যমে বাঁক তৈরি করে — এর জন্য উভয় মোটরকে তাদের গতি-টর্ক বৈশিষ্ট্যের সাথে ঘনিষ্ঠভাবে মেলাতে হবে এবং একটি সমন্বিত মোটর ড্রাইভার দ্বারা নিয়ন্ত্রিত হতে হবে যা একই সাথে উভয় চাকায় ডিফারেনশিয়াল গতি নির্দেশ করতে পারে। ট্রাইসাইকেল স্টিয়ারিং (সামনে একটি স্টিয়ারড ড্রাইভ চাকা, দুটি প্যাসিভ রিয়ার হুইল) একটি পৃথক স্টিয়ারিং অ্যাকচুয়েটর সহ একটি একক ড্রাইভ মোটর ব্যবহার করে — মোটর নির্বাচন সোজা, কিন্তু স্টিয়ারিং অ্যাকুয়েটর ইন্টিগ্রেশন বিবেচনা করা আবশ্যক। অমনিডাইরেশনাল ড্রাইভ (প্রতিটি কোণে মেকানাম বা ওমনি চাকা) চারটি পৃথকভাবে নিয়ন্ত্রিত মোটর ব্যবহার করে এবং পার্শ্বীয় এবং তির্যক গতির অনুমতি দেয় — মোটর কন্ট্রোলারগুলিকে অবশ্যই চার-চ্যানেল সমন্বয় পরিচালনা করতে হবে, এবং মোটরগুলির অবশ্যই তাদের অপারেটিং পরিসীমা জুড়ে চমৎকার গতির ম্যাচিং বৈশিষ্ট্য থাকতে হবে।
AGV ড্রাইভ মোটরগুলির জন্য কোন এনকোডার প্রকারের সুপারিশ করা হয়?
ক্রমবর্ধমান এনকোডারগুলি (চতুর্ভুজ A/B আউটপুট) হল AGV ড্রাইভ মোটর ওডোমেট্রির জন্য সবচেয়ে সাধারণ প্রকার — তারা প্রতি বিপ্লবে নাড়ি গণনা প্রদান করে যা নেভিগেশন কন্ট্রোলার চাকার দূরত্ব ভ্রমণ এবং গতিতে রূপান্তর করে। পরম এনকোডারগুলি মাঝে মাঝে এমন অ্যাপ্লিকেশনগুলিতে ব্যবহৃত হয় যার জন্য পাওয়ার-অন করার পরে হোমিং ছাড়াই নিয়ামকের অবস্থান জানার প্রয়োজন হয়, তবে ওডোমেট্রি (দূরত্ব পরিমাপ) এর জন্য, ক্রমবর্ধমান এনকোডারগুলি আদর্শ। মোটর শ্যাফটে 500-1000 পিপিআর রেজোলিউশন সাধারণত স্ট্যান্ডার্ড প্ল্যানেটারি গিয়ার রিডাকশন অনুপাতের সাথে ভাল ওডোমেট্রি নির্ভুলতার জন্য যথেষ্ট। উচ্চতর রেজোলিউশন (2000-4096 PPR) নিম্ন-অনুপাতের সিস্টেমে ওডোমেট্রিকে উন্নত করে যেখানে চাকা শ্যাফ্ট প্রতি মোটর বিপ্লবের একটি বৃহত্তর ভগ্নাংশকে স্থানান্তরিত করে।
AGV ড্রাইভ মোটর কি পুনর্জন্মমূলক ব্রেকিংয়ের সাথে ব্যবহার করা যেতে পারে?
হ্যাঁ — AGV অ্যাপ্লিকেশানগুলিতে BLDC মোটর কন্ট্রোলারগুলি সাধারণত পুনরুত্পাদনমূলক ব্রেকিংকে সমর্থন করে, যেখানে মোটর হ্রাসের সময় একটি জেনারেটর হিসাবে কাজ করে, গতিশক্তিকে আবার বৈদ্যুতিক শক্তিতে রূপান্তর করে যা ব্যাটারি রিচার্জ করে। রিজেনারেটিভ ব্রেকিং ব্যাটারি খরচ কমায় (বিশেষ করে AGV রুটে স্টপ-এন্ড-গোতে ঘনঘন ক্ষয় হওয়ার ঘটনা), ব্রেক পরিধান কমায় এবং যান্ত্রিক ব্রেক হিট ছাড়াই দ্রুত গতি কমানোর অনুমতি দেয়। একটি সাধারণ AGV অ্যাপ্লিকেশনে পুনর্জন্মমূলক ব্রেকিংয়ের শক্তি পুনরুদ্ধার দক্ষতা ত্বরণের জন্য ব্যবহৃত শক্তির 15-30%, উচ্চ-ফ্রিকোয়েন্সি শর্ট-রুট অপারেশনে অর্থবহ। রিজেনারেটিভ ক্ষমতার জন্য প্রয়োজন যে মোটর কন্ট্রোলার দ্বিমুখী কারেন্ট প্রবাহকে সমর্থন করে এবং ব্যাটারি ম্যানেজমেন্ট সিস্টেম ওভারভোল্টেজ সুরক্ষায় প্রবেশ না করেই পুনরায় জেনারেট করা চার্জ কারেন্ট গ্রহণ করে।
এজিভি ড্রাইভ মোটরস ঝেজিয়াং সাইয়া ইন্টেলিজেন্ট ম্যানুফ্যাকচারিং থেকে
Zhejiang Saiya Intelligent Manufacturing Co., Ltd. , Deqing, Zhejiang, BLDC প্ল্যানেটারি গিয়ার মোটর, ব্রাশড DC প্ল্যানেটারি গিয়ার মোটর, এবং স্বায়ত্তশাসিত নির্দেশিত যানবাহন অ্যাপ্লিকেশনের জন্য সম্পূর্ণ AGV ড্রাইভ মোটর সমাবেশ তৈরি করে। AGV পণ্য পরিসর 24V, 36V, এবং 48V নামমাত্র ব্যাটারি ভোল্টেজের সমন্বিত এনকোডার সহ ড্রাইভ মোটর ইউনিটগুলিকে কভার করে, ফ্রেমের আকারে 32mm থেকে 82mm ব্যাসের মধ্যে, 5:1 থেকে 500:1-এর বেশি গ্রহের গিয়ার হ্রাস অনুপাত সহ, কভারিং ট্রান্সপোর্ট-ডুটি-এজি-এজি ছোট-বড় উপাদান থেকে ছোট-বড়-ভর্তি উপাদান পর্যন্ত। হ্যান্ডলিং প্ল্যাটফর্ম। কাস্টম AGV মোটর স্পেসিফিকেশন — ভোল্টেজ, অনুপাত, এনকোডার রেজোলিউশন, মাউন্টিং, আইপি রেটিং, এবং সংযোগকারী — কোম্পানির OEM/ODM ডেভেলপমেন্ট পরিষেবার মাধ্যমে উপলব্ধ।
ড্রাইভ মোটর সুপারিশ এবং উদ্ধৃতি পেতে আপনার AGV স্পেসিফিকেশন — গাড়ির ওজন, পেলোড, সর্বোচ্চ গতি, ব্যাটারির ভোল্টেজ, চাকার ব্যাস এবং অপারেটিং পরিবেশ — সহ আমাদের সাথে যোগাযোগ করুন।
সম্পর্কিত পণ্য: AGV প্রকল্প পণ্য | ব্রাশবিহীন ডিসি গিয়ার মোটর | প্ল্যানেটারি গিয়ার মোটরস | যথার্থ প্ল্যানেটারি গিয়ারবক্স | ব্রাশড ডিসি গিয়ার মোটর
সম্পর্কিত পণ্য
-

এই 6W ইন্ডাকশন এসি গিয়ার মোটরটি একটি দক্ষ, কমপ্যাক্ট এবং নির্ভরযোগ্য ছোট মোটর যা বিস্তৃত শিল্প ও গৃহস্থালীর অ্যাপ্লিকেশনগুলির জন্য উপযুক্ত ot এটি একক-ফেজ 110V থেকে তিন-পর্যায়ের 220V পর্যন্ত ভোল্ট...
বিশদ দেখুন -

6 ডাব্লু ব্রাশ ডিসি জিবিয়ার মোটরটি দক্ষতা এবং বহুমুখীতার জন্য ডিজাইন করা হয়েছে, বিভিন্ন অ্যাপ্লিকেশনগুলির জন্য উপযুক্ত। 60 মিমি x 60 মিমি একটি কমপ্যাক্ট ফ্রেমের আকারের সাথে এটি টাইট স্পেসে নির্বি...
বিশদ দেখুন -

10 ডাব্লু ব্রাশ ডিসি গিয়ার মোটর বিভিন্ন শিল্প এবং শখের অ্যাপ্লিকেশনগুলির জন্য উচ্চ কার্যকারিতা এবং অভিযোজনযোগ্যতা সরবরাহ করে। 60 মিমি x 60 মিমি ফ্রেমের আকারের সাথে, এই মোটরটি পাওয়ারের সাথে আপস না...
বিশদ দেখুন -

24 ভি ব্রাশলেস গিয়ার মোটর একটি বহুমুখী এবং দক্ষ মোটর যা বিভিন্ন অ্যাপ্লিকেশনগুলির জন্য ডিজাইন করা হয়েছে। 60 মিমি x 60 মিমি থেকে 104 মিমি x 104 মিমি পর্যন্ত মাত্রা সহ, এই মোটরটি বিভিন্ন সরঞ্জামের ...
বিশদ দেখুন -

32 মিমি ব্রাশযুক্ত প্ল্যানেটারি গিয়ার মোটর হ'ল একটি কমপ্যাক্ট এবং দক্ষ সমাধান যা উচ্চ টর্ক এবং সুনির্দিষ্ট নিয়ন্ত্রণের জন্য বিভিন্ন অ্যাপ্লিকেশনগুলির জন্য ডিজাইন করা হয়েছে। 32 মিমি ব্যাসের ...
বিশদ দেখুন -

42 মিমি ব্রাশ প্ল্যানেটারি গিয়ার মোটর হ'ল একটি বহুমুখী এবং দক্ষ উপাদান যা বিভিন্ন অ্যাপ্লিকেশনগুলিতে ব্যাপকভাবে ব্যবহৃত হয় যা সুনির্দিষ্ট টর্ক এবং গতি নিয়ন্ত্রণের প্রয়োজন হয়। 0.7 থেকে 1.1...
বিশদ দেখুন -

32 মিমি ব্রাশলেস প্ল্যানেটারি গিয়ার মোটর একটি উচ্চ-পারফরম্যান্স, দক্ষতা এবং নির্ভরযোগ্যতার প্রয়োজন অ্যাপ্লিকেশনগুলির জন্য কমপ্যাক্ট সলিউশন আদর্শ। 24 ভি এর রেটেড ভোল্টেজে অপারেটিং এবং 20W শক্তি গ্...
বিশদ দেখুন -

42 মিমি ব্রাশলেস প্ল্যানেটারি মোটর একটি উচ্চ-দক্ষতা মোটর পণ্য যা বিভিন্ন পরিস্থিতিতে ব্যাপকভাবে যথার্থ সংক্রমণ প্রয়োজন। এই মোটরের রেটেড কারেন্টটি 1.3 এ এবং রেটেড টর্কটি 0.048n.m. এটি বিভিন্ন জটিল ...
বিশদ দেখুন -

40, 60, 80, 120 এবং 160 মডেল সহ এসপিই সিরিজের গিয়ারবক্সগুলি, ফ্ল্যাঞ্জ আকারের পরিসীমা দক্ষ এবং শক্তিশালী শক্তি সংক্রমণ সমাধান সরবরাহ করার জন্য ডিজাইন করা হয়েছে। এই গিয়ারবক্সগুলি একটি বৃত্তাকার আ...
বিশদ দেখুন -

এসপিএফ সিরিজটি স্কোয়ার আউটপুট ফ্ল্যাঞ্জগুলির সাথে রয়েছে, 40 মিমি থেকে 160 মিমি পর্যন্ত মাত্রাগুলি সামঞ্জস্য করে। এই ফ্ল্যাঙ্গগুলি বিভিন্ন শিল্প অ্যাপ্লিকেশনগুলিতে দক্ষতা অর্জনের জন্য ইঞ্জিনিয়ার ...
বিশদ দেখুন -

52 মিমি ব্রাশযুক্ত প্ল্যানেটারি গিয়ার মোটর একটি উচ্চতর টর্ক এবং সুনির্দিষ্ট নিয়ন্ত্রণের জন্য প্রয়োজনীয় বিভিন্ন অ্যাপ্লিকেশনগুলির জন্য ডিজাইন করা একটি কমপ্যাক্ট এবং দক্ষ সমাধান। 52 মিমি ব্যাসের ...
বিশদ দেখুন -

62 মিমি ব্রাশ প্ল্যানেটারি গিয়ার মোটর হ'ল একটি বহুমুখী এবং দক্ষ উপাদান যা বিভিন্ন অ্যাপ্লিকেশনগুলিতে ব্যাপকভাবে ব্যবহৃত হয় যা সুনির্দিষ্ট টর্ক এবং গতি নিয়ন্ত্রণের প্রয়োজন হয়। 2.5 থেকে 5.5...
বিশদ দেখুন
যোগাযোগের বিশদ
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / ট্রেড [email protected] / [email protected]
- অফিস: হ্যাংজহু সাইয়া ট্রান্সমিসন সরঞ্জাম কোং, লিমিটেড
- Office Address: রুম 2201, ওয়ানিন বিল্ডিং, হ্যাংজহু সিটি, ঝিজিয়াং প্রদেশ
- কারখানা: ঝেজিয়াং সাইয়া ইন্টেলিজেন্ট ম্যানুফ্যাকচারিং কোং, লিমিটেড
- Factory Address: নং 35 বিল্ডিং, ঝিঙানান হাই-টেক ইউনহে ঝিগু ইন্ডাস্ট্রিয়াল পার্ক, জিনান টাউন, ডেকিং কাউন্টি, হুঝু সিটি, ঝেজিয়াং, চীন
দ্রুত লিঙ্ক
পণ্য
আপনি যদি আগ্রহী হন
আমাদের পণ্যগুলিতে,
আমাদের সাথে পরামর্শ করুন
Copyright © ঝেজিয়াং সাইয়া ইন্টেলিজেন্ট ম্যানুফ্যাকচারিং কোং, লিমিটেড All Rights Reserved.
কাস্টম গিয়ার হ্রাস মোটর সরবরাহকারী
